Poslední aktualizace v srpnu 2020
Úvod
Čipy PICAXE nabízejí široký sortiment instrukcí pro řízení výstupů. V
tomto článku popisuji, na jakém principu funguje protokol sériové
komunikace a jednoduchý příklad programu, kterým lze pomocí sériového
rozhraní ovládat výstupní piny mikrokontroléru.
Protokol sériové komunikace
Od komunikace pomocí sériového kanálu vyžadujeme několik důležitých
funkcionalit. Jde nám o to, aby mikrokontrolér poznal, kde na portu začíná
začátek protokolu, zda je komunikace určená pro náš mikrokontrolér
(adresace), případně, zda byl protokol odeslán z kontroléru k tomu
určenému, aby byla přenesena data v potřebném sledu a případně, aby na
konci protokolu byl znak, že takovým bajtem protokol končí.
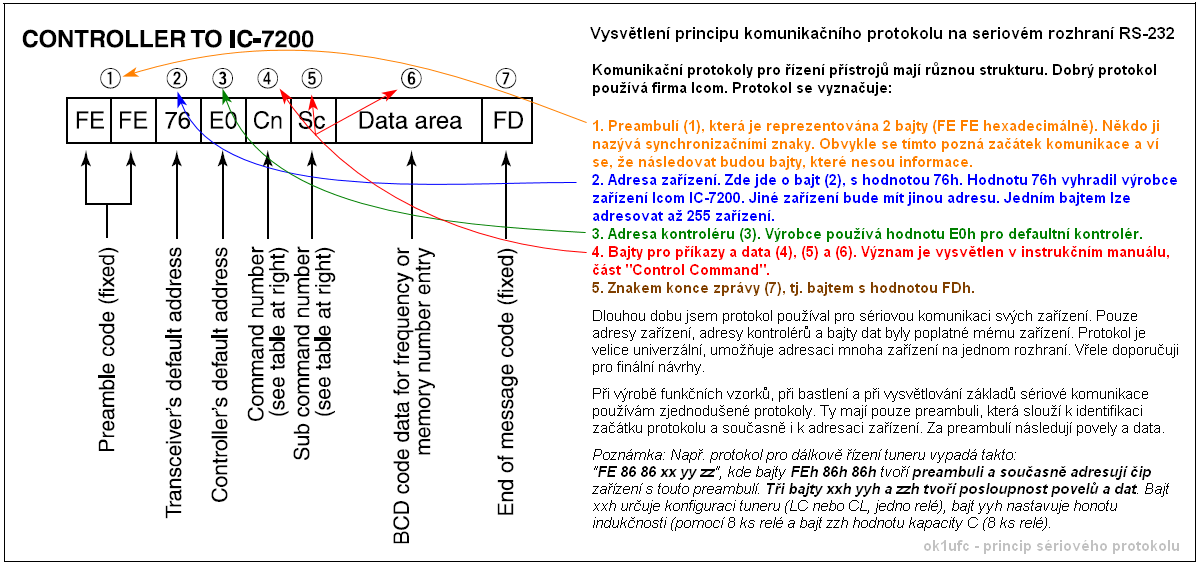
Opakuji, že po sériovém kanálu se přenášejí všechny uvedené informace bajt po bajtu (tj. běžně po 8 bitech). Za dobrý, ale velice jednoduchý a přehledný protokol považuji protokol, který používá firma Icom pro komunikaci se zařízeními. Základní tvar protokolu zde znovu vysvětluji na komunikaci kontroléru (zde rozuměj program v PC) do zařízení (zde rozuměj zařízení Icom, konkrétně zařízení s adresou 76h, což je TCVR IC-7200. Originální manuál s částí, ve které je popsán protokol, sada příkazů, subpříkazů a dat s parametry, je ke stažení zde.
|
|
|
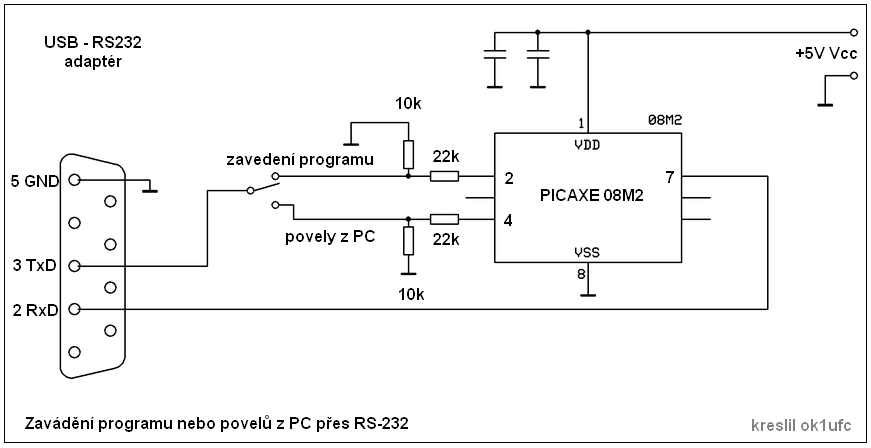
Zapojení mikrokontroléru a instrukce PICAXE pro sériovou komunikaci Čipy PICAXE jsou stvořené pro sériovou komunikaci. Pomocí sériové komunikace je rovněž do čipů zaváděn program. Čipy můžeme naprogramovat v jednoduchém přípravku (bude popsán) nebo přímo v přístroji, kde jsou zapojené. V přípravku programuji čipy, které jsou v pouzdře DIP. Do přístroje vložím do patice naprogramovaný čip. V přístroji programuji čipy, které jsou zapájené. K programování a k finální komunikaci používám rozdílné sériové vstupy, viz obrázek: |
|
|
|
Příklad jednoduchého programu pro dálkové ovládání
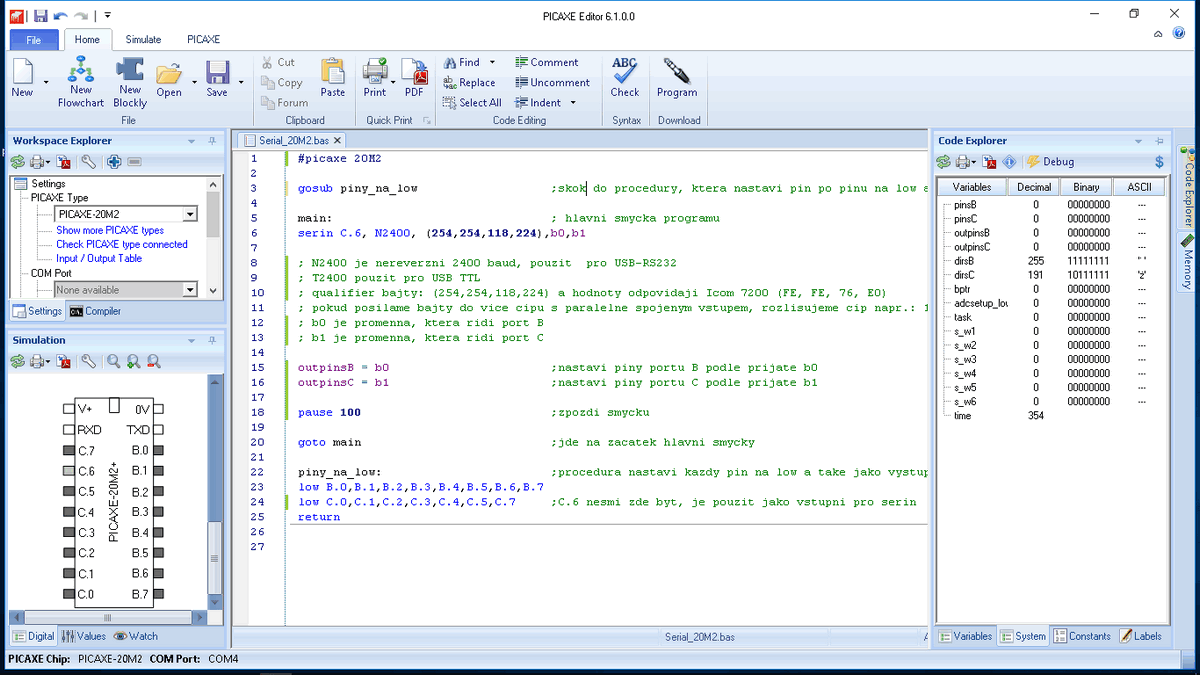
Nejjednodušší, ale plně funkční program je popsán obrázkem náhledu na programovací prostředí PICAXE Editor 6.1.0.0; program je bohatě komentován, ale i tak je napsán asi na 25 řádcích včetně komentáře. Potřebné instrukce jsou jen asi na 10 řádcích. Program po připojení napájení provede nějaká nastavení (níže bod č. 1) a potom cyklicky vykonává hlavní smyčku, která začíná na návěští main: 1. Program jde do procedury, která nastaví výstupní piny na úroveň low.
|
|
|
|
Program je velice jednoduchý a přehledný. Abychom se vyznali přesně v tom, co konkrétní instrukce dělají, doporučuji si o tom přečíst ve stručném přehledu (v českém jazyce, staženo z internetu, autor neznámý, omlouvám se, že jsem si nenapsal zdroj, je to hezky přehledné). Úplný přehled instrukcí je obsahem druhého manuálu - lze stáhnout zde a také na stránkách výrobce čipů PICAXE zde: https://picaxe.com/getting-started/picaxe-manuals/ Editor, který jsem použil k napsání programu a naprogramování čipu není jediný, který je k dispozici. Osobně ho považuji za nejlepší. Je určen pro Windows a vyžaduje mít instalovaný Framework .NET verze 3.51. Další vývojová prostředí pro programy PICAXE jsou k dispozici na stránkách výrobce: https://picaxe.com/getting-started/software-selection/ Jiný
příklad sériové komunikace s adresací čipů, který využívá stejný
program, je popsán zde:
http://ok1ufc.nagano.cz/Gambas_stranky/serial_picaxe/serial_expander.htm |
|
|